zh
姓名格式错误
公司名称格式错误
数据堂严格遵守用户隐私条款,您所填写的信息我们会严格保密,请放心填写~
来源: 数据堂
选择稀疏控制点的多标记3D点云标注
本文提出了细粒度的点云标注一个用户友好的方式。该方法要求用户通过鼠标接口选择属于对象的稀疏控制点。可以将多个控制点分配给相同的标签。该软件利用所选的控制点,在最短路径树上进行邻域图的分割算法。用户提供了对结果的实时反馈,并且可以纠正切分错误。与以前的工作相比,该方法支持散乱3D点云标注的多标签标注。该方法已被多个用户评估,并与标准的基于矩形的选择技术进行了比较。结果表明,所提出的方法被认为更容易使用,它允许更快的分割,即使在复杂的情况下,闭塞。
带注释的数据集在三维视觉研究中变得越来越重要。例如,用带注释的3D数据作为地面真实度来评估自动分割算法。注释还可以支持数据关联和检索。此外,机器学习的最新趋势(如深度学习)需要大量的标记数据来训练。对二维图像进行数据注释是人类的一项费时费力的任务。三维数据的注释,如散乱的点云,更麻烦,因为它需要处理卷的选择和可视化问题。
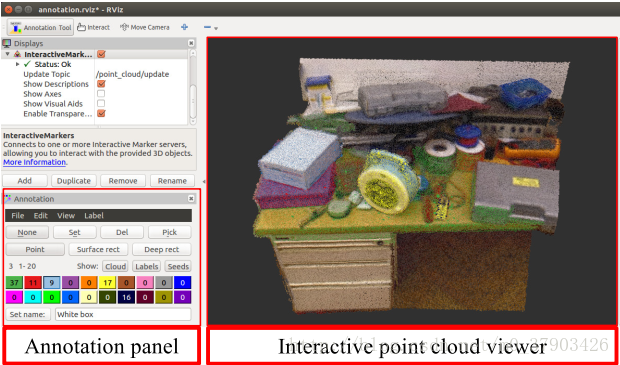
Figure 1. The RViz-based interface of the annotation tool.
本文提出了一种支持散乱点云的多标记三维数据标注方法。在该方法中,用户在点云上选择稀疏的“控制点”。同一个对象上的多个控制点可以被选择并关联到同一个标签。可以定义任意数量的标签。选定的控制点作为输入用于自动点云分割算法。特别是,应用最短路径树算法将点云中的每个非选择点分配给最近的控制点。分割算法在最近邻图上操作,由点相异加权。已经实现了许多优化,以利用注释过程的增量性质来实现实时性能。开发了一个交互式的基于鼠标的用户界面来评估所提出的方法。应用程序是在顶部的rviz可视化工具[ 8 ]的ROS(机器人开发的操作系统)的中间件。图1显示了图形用户界面的图片。该工具已作为[ 11 ]中的开源发布。
用法线对彩色点云进行了实验。虽然没有必要,但颜色和法线向量的信息被用来计算点之间更精确的距离函数。开发的用户界面由多个用户评估。结果表明,所提出的注释方法比标准技术更简单,速度更快,用于许多三维软件工具中,需要分割的对象的所有点都通过在屏幕上拖动二维矩形来迭代选择。事实上,在我们的方法中,用户只需要选择属于对象的一些可见点进行分割,直到他/她对分割结果满意为止。
本文的结构如下。第2节讨论三维数据注释的最新进展。第3节描述了所建议的方法,而第4节说明了开发工具的用户界面。第5节报告实验结果。第6节结束了这项工作。
有组织的点云,如距离相机获得的点云,可以比无组织点云更容易注释,因为它们可以投射到传感器图像帧上。rgbd图像的注释是由罗素等人的工作考虑。[ 12 ],LabelMe在线标注工具[扩展] 13。然而,注释还对范围图像采用折线选择技术。在[ 17 ],对rgbd图像注释推断场景的三维结构,通过结构和几何上标注会议获悉的先验知识辅助。在[ 14 ]交互式语义建模方法对室内场景提出了rgbd图像。在[ 18 ]中,提出了一个三维重建和标记工具,其中注释标签从一帧传输到另一帧。以前引用的方法都不适合散乱点云。
在其他作品中二维选择集扩展到三维,三维选择策略已在文献中提出的离散对象的bacim等人讨论。[ 1 ]。在[ 19 ]中开发了两种空间结构感知选择技术。这些技术只需要用户绘制套索,即围绕3D点云重要部分的二维投影的循环。虽然有效,这种选择算法是相当复杂的,不实时工作。许多作者研究了使用3D接口进行选择。科菲等人。[ 5 ]提出了一个利用触摸接口支持数据子集选择的虚拟现实系统。在3dui竞赛部分,几个解决方案[ 2, 10 ]提出了基于虚拟现实和手势。在[ 15 ]中,预选阶段允许在3D环境中更容易地导航。然后,实现一个3D指针来执行实际选择。3D用户界面的一个缺点是,它们通常需要非标准的3D硬件,这可能需要额外的训练。此外,选择使用先进的3D接口可能会让用户感到疲劳。
博伊科等人也研究了大规模辅助注释的机器学习技术。在[ 4, 3 ]。该方法假定点云由许多相似的对象组成,这些对象的形状是由系统学习的。
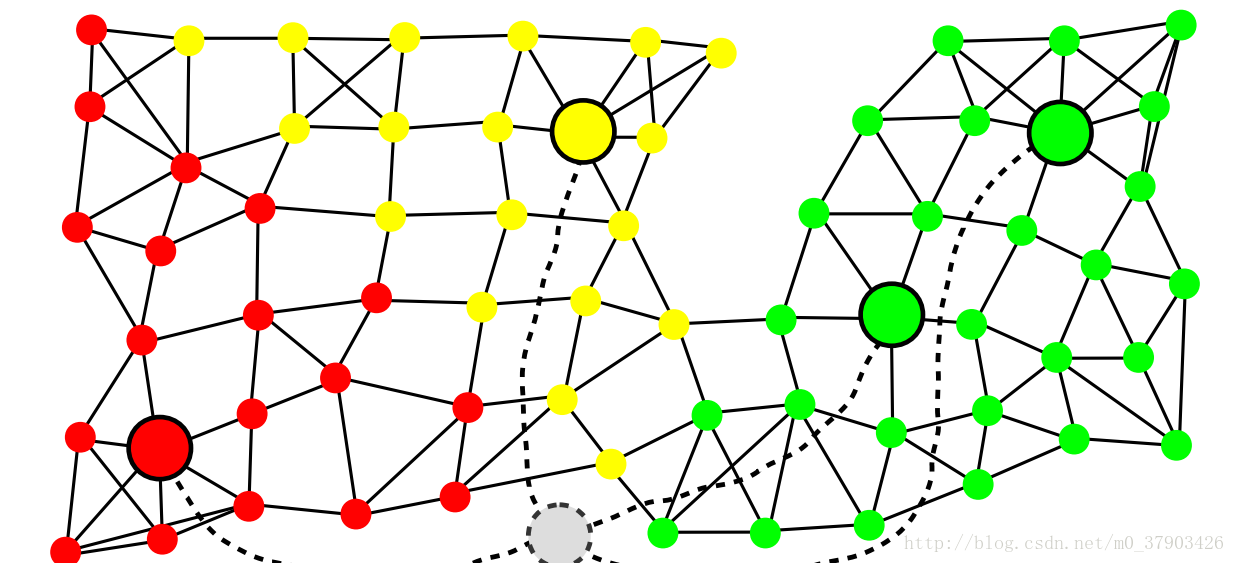
图2。邻域图的注释实例。虚拟点以浅灰色显示,并连接到所有控制点(虚线弧)。
我们在[ 7 ]中提出了类似的方法,其中控制点被命名为“约束”。约束用于在点云上执行最小割算法,以将前景对象与背景分离。同样,在[ 9 ]中引入了用户绘制笔画的最小割算法。然而,虽然有效的分割单个对象从背景,最小割算法不适合分割任意数量的对象在一个场景中。
在该方法中,首先生成点云中最近点的最近邻图。然后,给定一组选定的控制点,计算出最短路径树,将点云分割成段。所有控制点连接到一个虚拟节点R,它作为最短路径树的根。每个控制点都是虚拟节点子树的根。子树中的点共享相同的标签,这是根控件点的标签。多个控制点可能具有相同的标签。给定足够的控制点,场景中的对象可以被正确分割。
图2中示出了一个注释示例。控制点由较大的节点显示,并连接到虚拟节点(以浅灰色显示)。每个节点获取最短路径树中可达的最近控制点的标号(颜色)。在报道的例子,两个控制点具有相同的绿色标签,因此,在子树的所有点都具有相同的标签。
的详细介绍,给出了点云的C和一组用户选定的控制点CP⊂C,算法的目标是将李的每一点每一点我2 C标签的位置矢量PI的描述,一个RGB颜色词和法向量镍。位置pi是强制性的,颜色和法向量是可选的。一个标签LJ是分配给每个控制点J 2 CP。此外,子树标记李,其中包含子树根(即控制点)的索引,被分配到点云的每一个点。然后,一点全局标签计算Lli李。






因文章较长,本文仅转载上半部分,即:第2节,三维数据注释的最新进展,和第3节描述了所建议的方法。而第4节开发工具的用户界面、第5节报告实验结果,以及第6节结束这项工作。将下期分享。文章名称:解读多标记3D点云标注

数据堂官方微信

提交成功!感谢您支持数据堂。
确定
暂无数据
取消
呼叫
安全合规
数据堂符合并遵守数据保护条例对隐私数据保护的要求,并且已通过ISO27001信息安全管理体系、ISO9001质量管理体系认证。
手机格式错误
请填写姓名
请填写手机号码
请填写公司全称
请填写企业邮箱
需求描述格式错误
需求描述不能为空
联系我们
姓名
手机
公司名称
企业邮箱
需求
提交
点击下载
企业邮箱格式错误